
資訊 
了解行業以及華進新聞資訊。
“空間機器人”關鍵技術專利布局分析
2020-05-14

空間機器人發展特點和趨勢
基于我國航天技術進步和產業發展需求,國家知識產權局專利分析普及推廣項目空間機器人課題組從在軌服務機器人技術、星表移動機器人技術、MDA公司專利布局、國外型號重要專利剖析、技術轉移可行性分析等五個視角出發,對空間機器人技術進行深度剖析。
>>> 在軌服務機器人
近年來,人工智能、機器人等新興技術飛速發展,為在軌服務機器人提供了良好的研究基礎,美國、歐洲、日本等國家或地區均開展了相應的在軌服務機器人研制項目和發展計劃,并在核心技術分布、地域部署上形成了專利體系化布局。
基于全球空間機械臂、操作末端和自主操作技術領域的專利文獻分析,獲得了主要技術創新國家的技術研究重點。
其中,美國作為空間機器人項目開展最多的國家,其相關技術發展得到德國、日本、加拿大等國的協助,其在軌服務機器人領域的技術創新側重于機械臂空間冗余構型設計、空間仿人靈巧手、空間目標對接技術等技術方面,并在自主在軌加注、在軌模塊更換與裝配和空間碎片清理方面取得了較大技術突破。
日本參與了美國早期空間機器人項目研制,具有較強的技術實力,其在軌服務機器人的技術創新側重于空間機械冗余構型設計和空間目標對接技術,且近些年的自主操作技術以空間碎片清理為主,技術方案側重于魚叉繩系機器人和電磁吸附抓捕。
在軌服務機器人的空間目標對接技術專利申請量排名第一,從核心專利分析情況來看,MDA公司、波音公司和NASA的空間目標對接技術主要側重于非合作目標,以及沒有對接特征空間目標的捕獲與對接技術,不僅可以對早期的在軌飛行器進行延壽操作,而且可以應用于空間軍事衛星捕獲和降軌操作。另外,通過梳理空間目標捕獲與對接技術的發展歷程發現,目前國內外針對空間目標的捕獲方式呈現多元技術并行發展趨勢,具體涉及繩系或飛網捕獲、抓取捕獲、插接捕獲和吸附捕獲;捕獲對象從合作目標擴展到了非合作目標,且捕獲目標從低軌向高軌逐步擴展。
>>> 星表移動機器人
星表移動機器人主要包括輪式移動機器人、腿式行走機器人和輪腿組合式移動機器人等類型,它們各有相應的特點和適用范圍。
根據對星表移動機器人相關專利文獻的分析可以發現,星表移動機器人領域的技術創新從20世紀60年代至今一直保持一定的熱度,專利技術的出現與重要事件的發生相伴相生。
90年代以前世界范圍內主要圍繞輪式移動機器人開展相關的技術研發和專利布局,90年代以后腿式機器人的相關研究開始變得活躍,進入21世紀后,將輪式移動機構的高速高效性能和腿式移動機構的地形適應能力相結合的輪腿組合式移動機器人越來越受到業內的重視,全球范圍的相關研究如火如荼地開展,但由于輪腿機器人結構和控制更為復雜,還有大量的科學問題、內蘊機理和基本特性的認識尚需突破,實際應用還需一定的時日。
在星表移動機器人中,輪式移動機器人(也叫星球車)因技術相對成熟而得以廣泛應用,是目前成功登陸月球和火星的表面探測器采用的結構形式。對于星球車,車輛整體的結構設計、懸架機構、車輪機構和移動控制是決定機器人能否順利通過行星表面和完成指定任務的關鍵技術和重要因素。
通過對各個時間階段的代表性專利文獻進行分析可知,輪式移動機器人的技術發展大體經歷了如下過程:20世紀60年代主要是基于地面車輛進行改造,尤其針對車輪結構展開設計和測試;60年代末到70年代初圍繞車輛的懸架系統進行改進和優化;到了80年代,為了進一步適應火星探測的任務,研究開發新的懸架系統;進入90年代,對車輛的結構和功能進行優化設計,例如懸架的折展設計以提高星球車的可運輸性;進入21世紀后,對于輪式移動機器人的移動控制和智能化方面的研究增多,近幾年更是向著提高機器人多功能性的方向發展,以適應多樣化的應用需求、提高空間運輸和作業效率。
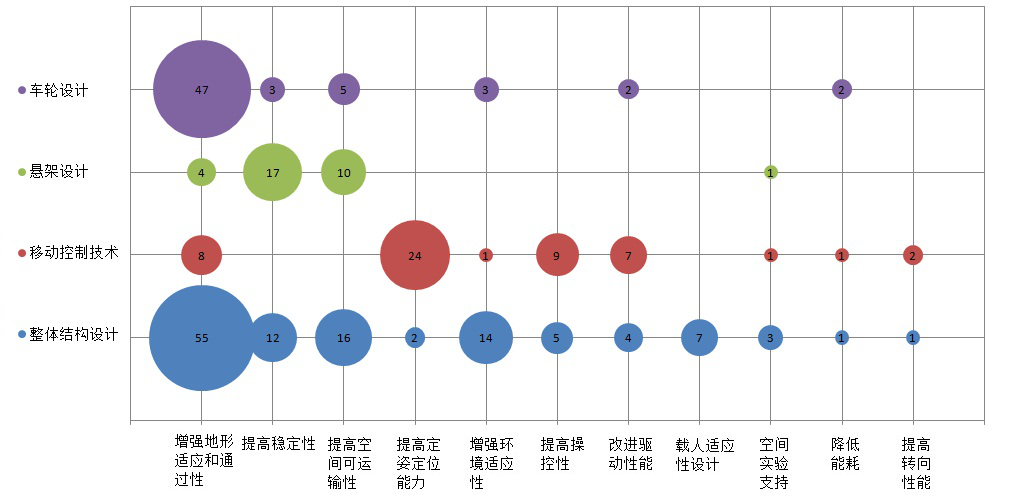
輪式機器人移動系統技術功效矩陣分析圖
通過對輪式機器人移動系統開展技術功效矩陣分析可知,用于增強地形適應和通過性、提高穩定性、提高空間可運輸性,以及提高定姿定位能力的專利技術較多,用于實現空間實驗支持(包括零重力實驗、便于采樣和樣品收集等)、降低能耗、提高轉向性能的相關專利文獻較少。增強地形適應和通過性與四種技術手段都相關,其中通過車輪和整體結構設計來實現的專利文獻最多;而提高穩定性和空間可運輸性與懸架設計、車輪設計和整體結構設計三種技術手段相關,其中提高穩定性最相關的技術手段是懸架設計,而提高空間可運輸性最主要是通過對車輛進行輕量化、模塊化、小型化等整體結構設計來實現。此外,定姿定位能力、可操控性、驅動性能和轉向性能主要由移動控制技術來提高和改進。而載人適應性設計主要是在整體結構設計中考慮供氧、照明、安全保障和乘坐舒適性等方面而進行功能增設和優化。
>>> MDA公司專利布局
加拿大MDA公司基于其先進的空間機器人技術,已成為美國在軌服務項目的主要研制方之一,其專利技術創新主要側重于自由飛行器捕獲、在軌加注工具與安全操作,以及通信衛星在軌組裝等。MDA公司在軌服務機器人的專利申請主要分布在美國、加拿大和歐洲。MDA公司在20世紀70年代就開始在美國布局相關專利,隨著MDA公司參與美國在軌服務項目越來越多,其在美國的專利申請量也呈現大幅上升趨勢;近些年,MDA公司更側重于在日本進行專利布局。
MDA公司研制的空間基礎設施服務(SIS)航天器可以在GEO上開展在軌加注任務,可以攜帶推進劑箱到達GEO,并裝備了機械臂和工具箱來維護衛星。圍繞上述服務航天器的研制,MDA公司于2008年至2016年在全球布局了75件專利,主要分布在美國、加拿大、日本、歐洲(EP)和俄羅斯,實現了SIS航天器在未來市場國家的權利保護,專利主要涉及在軌燃料加注系統總體技術、推進劑傳輸系統、安全操作工具和目標航天捕獲固定方案等。
>>> 國外項目重要專利剖析
美國宇航局推進的空間機器人研究計劃和發展項目最多,為了對其技術發展動態進行深入剖析,本課題獲取了其重要空間機器人項目的專利簇,具體涉及第二代機器人宇航員(Robonaut2)、小行星重定向任務的TALISMAN機械臂系統 、“蜻蜓”在軌衛星組裝項目、“蜘蛛制造”空間制造系統等。
其中,NASA與通用公司合作聯合研制的第二代機器人宇航員(Robonaut2),于2011年進入國際空間站,成為空間擬人機器人發展的里程碑之一。
針對Roubonaut2的研制,NASA與通用公司在2008年至2015年聯合提交了42項與第二代機器人宇航員Robonaut2相關的專利申請,具體涉及總體技術、控制技術、感知技術、通信技術、交互操作技術、任務規劃技術,以及靈巧機器人手臂、手指等。Roubounaut2的專利布局側重于美國、日本和德國,且近些年選擇在中國、加拿大和澳大利亞進行布局,主要涉及到整體結構、任務規劃、靈巧操作控制和驅動等關鍵技術,這些技術可以在工業領域進行技術轉移應用,具有較大的商業推廣應用價值。
通過梳理Roubonaut2項目的靈巧手技術發展歷程,發現從2009年至2014年,NASA和通用公司在靈巧手技術方面提交了10項相關專利申請。其中,2009年的5項專利申請分別涉及手腕、拇指組件、手指肌腱驅動、手指執行器和抓握裝置;2010年的兩項專利申請主要涉及手指控制,2013年的專利(公告號:US8857874B2)對Roubonaut2的手指組件進行技術改進;2014年的專利(公告號:US8919842B2)則對靈巧手的肌腱操作技術進行了改進。
總體上來說,NASA和通用公司通過機械結構、驅動、控制等方面的技術創新,實現了靈巧手的仿人操作靈活性、穩健性、精細程度和及時反應等方面進行了能力提升。
>>> 空間機器人技術轉移可行性分析
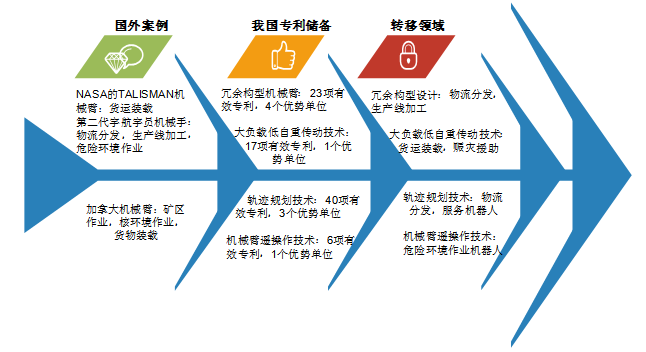
關鍵技術轉移部分案例
專利的價值除了對自主創新的技術進行有效保護之外,更重要的是通過對其實施轉化獲取經濟效益。
空間機器人在空間環境工作要滿足嚴苛條件,客觀上要求其技術標準相比于地面更加嚴格,能夠滿足空間環境要求的空間機器人在未來向工業等其他領域進行技術轉化的空間廣闊。本課題梳理了空間機器人中可向民用領域推廣,并適應市場需求的關鍵技術,并結合國外案例、我國專利儲備、轉移領域,對梳理出的關鍵技術進行技術轉移可行性分析,如上圖所示。
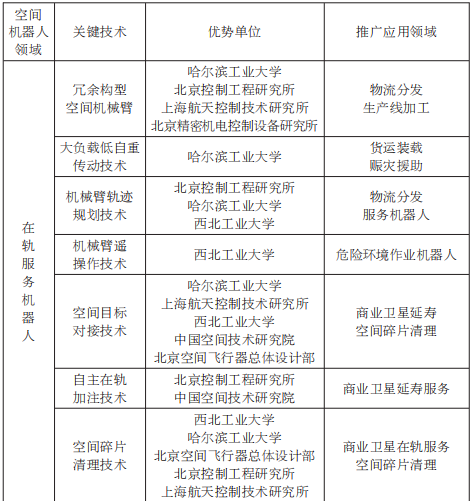
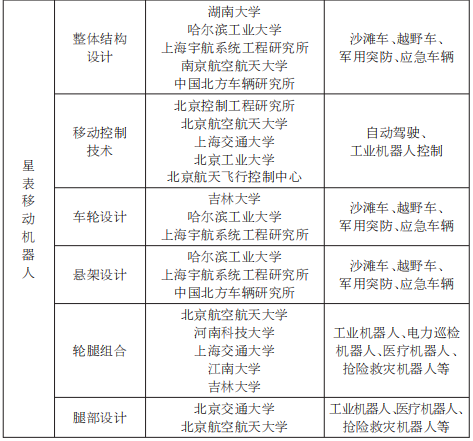
空間機器人關鍵技術轉移目錄清單
如表所示,為促進空間機器人技術向民用領域推廣,以適應航天技術產業化需求,本課題匯總我國具有技術轉移前景的技術方向及其轉移領域,形成我國空間機器人技術轉移目錄清單。
國家知識產權局
2018年專利分析普及推廣項目
空間機器人課題組
Copyright ? 2021 華進聯合專利商標代理有限公司.All Rights Reserved.粵ICP備12081038號



 400-883-1990
400-883-1990
 info@aciplaw.com
info@aciplaw.com
